

三次元物体検出_Tengun-label
- Tengun-label
- 2022年9月6日
- 読了時間: 4分
◉背景
センシング技術が進むお陰て、3Dデータが取りやすくなりました。その中、特にLidarが色々な場面で活躍しています。
2Dデータと比べて、3Dデータはもう一次元の「距離」情報を提供します。それによって、リアル世界を更に深く理解することが可能になる。
3Dデータ+深層学習では、色々なリアル問題を解決しました。
◉三次元点群の応用
Lidarから三次元点群を取得できます。
自動運転(車、ロボット)では、三次元点群+深層学習は重要である。
深層学習により、三次元点群データを自動処理できます。以下のタスクで応用できます:
三次元点群セグメンテーション(PointCloud Segmentation)
三次元物体検出(3D Object Detection)
三次元物体認識・分類(3D Object Classification)
三次元物体追跡(3D Object Tracking)
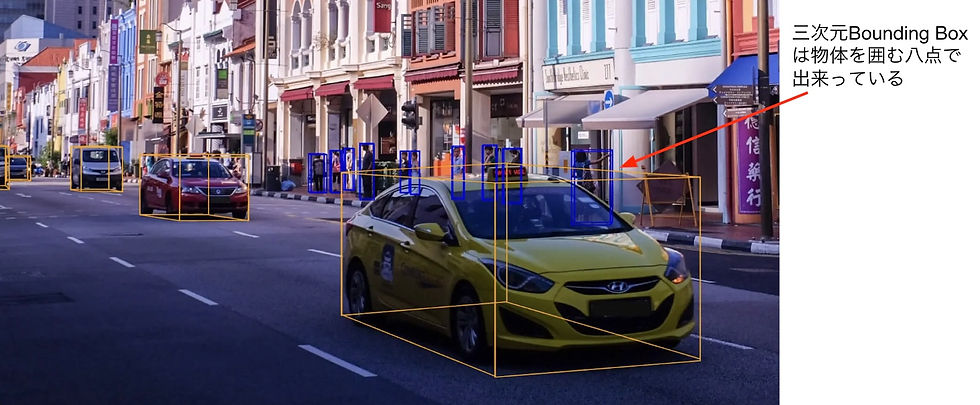
【自動運転の事例:Lidarデータによる物体検出】

【Augment Realityの事例】

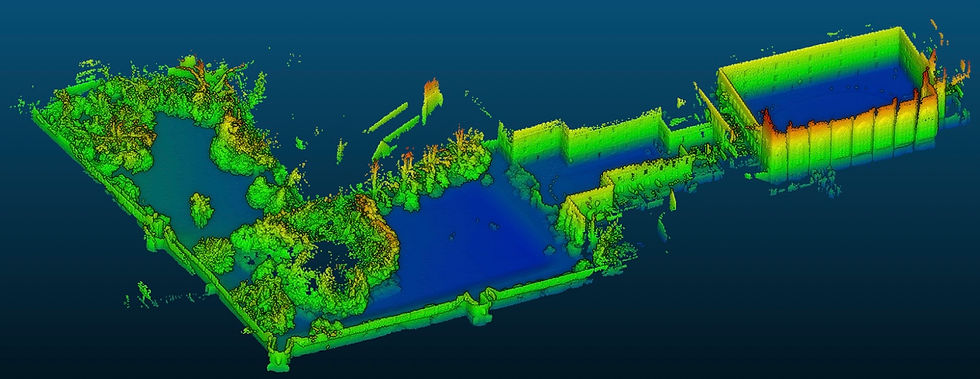
【クオリティ分析の事例:設計とリアルを照らし合わせる】

【3D環境再構築の事例:環境を再構築する】
【SLAMの事例:リアルタイムで居場所を計算する】

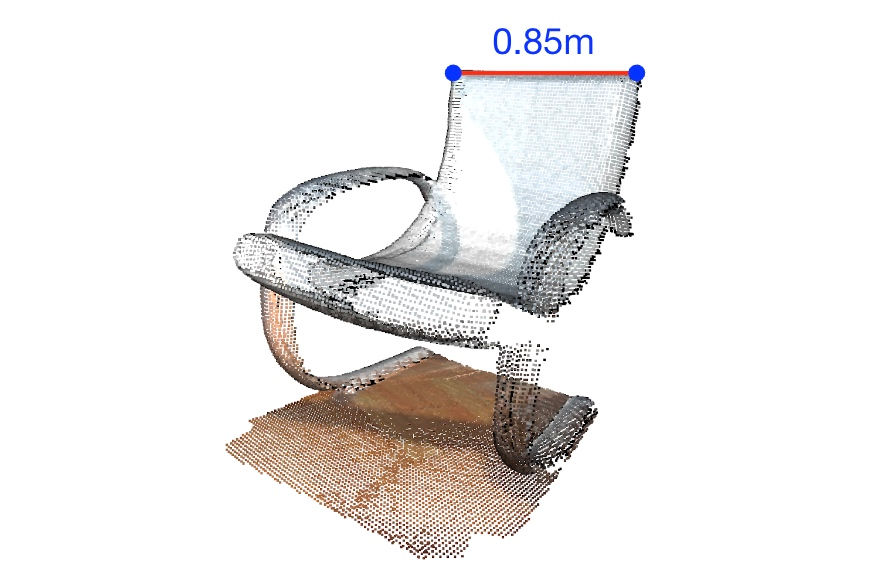
【距離計測の事例:リモートで距離を計測する】
◉三次元点群の応用:三次元物体検出
自動運転をする際に、周囲の物体(車とか)を検出する必要がある。そうすると、車が周囲の環境を”理解”できる。
:手法
車に搭載するセンサーから得るデータを基づいて、3D物体検出を行う
3D物体検出では、オブジェクトの種類、サイズ、距離を検出できる
3D物体検出によって環境を”理解”できると、車が相応の行動を取れる
【物体検出:三次元物体のBounding Boxを検出する】
■車に搭載されるセンサー
CAMERA:RGBデータを取得する為のカメラ
LIDAR:Laserを使って、三次元点群を取得するためのセンサー
RADAR:音声を使って距離を判断するためのセンサー
LIDARは三次元情報を直接提供するので、3D物体検出に役立つ。
CAMERAは2Dデータを提供するが、3D物体検出にとっては、点群ほどストレートではない。
■データを取得するためのセンサー

【三次元物体検出:Model】
点群が取得した後、深層学習で3D物体検出を行う。
3D物体検出深層学習モデルをいくつ紹介いたします。
PointNet
VoxelNet
PointPillars
IA-SSD
BEVFusion
【三次元物体検出:PointNet】
◉PointNetは点群データを直接処理する

■PointNetモデルの処理プロセス
点群をインプットにする
処理しやすく為、Transform Moduleでインプットを変換する
Multilayer perceptron(mlp)層によって、特徴の次元を拡大する
もう一度Transform Moduleで変換する
mlp層とmax pooling層の組み合わせて、結果を絞り出す
◉Transform Module

PointNetは深層学習で三次元データを処理する初めてのマイルストーン
PointNetはTransform moduleによって、点群を適切に変換して処理する(人間が視点を変わって物体を観察すると似ている)
PointNetは点群データを直接利用するので、精度と効率は低い
点群のままでは、表現力が弱い
点の数が多い為、無駄な処理が多い
【三次元物体検出:VoxelNet】
■Voxelを基本単位で点群を処理する
Voxelを使って、空間を区切る
Voxelは内部の点によって、Voxelの特徴を生成する
3D Convolution Neural Network(CNN)で、特徴を処理する
目標のBounding Boxを絞り出す
End-to-End Learning for Point Cloud Based 3D Object Detection (CVPR 2018)

Voxel単位で処理するので、PointNetより効率が高い
Voxelの特徴抽出部分を丁寧に設計した
PointNetと比べて、Transform moduleは使えなくなる
Voxelのサイズはフィクスされるので、点群密度のばらつきが大きいと(例:Lidarデータ)、VoxelNetの精度が落ちる
3D CNNを使うので、処理速度が高くない
【三次元物体検出:PointPillars】
◉Lidarデータの形はケートと似ている

◉PointPillars:Pillar(細長いVoxel)を基本単位にする

■Pillarsを基本単位で点群を処理する
Pillarsを使って、空間を区切る
Pillarsは内部の点によって、Pillarsの特徴を生成する
2D Convolution Neural Network(CNN)で、特徴を処理する
目標のBounding Boxを絞り出す2D CNNを使うので、処理速度は高い(40FPS以上)
◉2DのPyramid構造を持つNeural Networkを使って処理する

PointPillarsはLidarに対して設計したモデル
2D CNNを使うので、処理速度は高い(40FPS以上)
Lidarデータ上の物体検出の精度が高い
【三次元物体検出:IA-SSD】
■Lidarの点群の中、全ての点は同じく重要ではない
目標オブジェクトの重要度は高い
バックグランドの重要度は低い
■重要度に応じるサンプリングする
重要な点に対して、高い頻度でサンプリングするべき
重要でない点に対して、低い頻度でサンプリングするべき
■提案したサンプリング手法
サンプリングModuleを学習させて、ベストなサンプリングを行う

■提案したサンプリング手法
MLP層で目標クラスに対してを頻度高くサンプリングする
オブジェクト中心に近いほど、サンプリング頻度を高くする
■この手法のメリット
必要な点を多めにサンプリングでき、必要のない点を少なめにサンプリングすることができる
結果:高速且つ高精度で物体検出ができる(80FPS以上)
【三次元物体検出:BEVFusion】
BEVFusion:カメラデータとLidarデータを融合して物体検出を行う
この前の手法はLidarのみ利用したが、自動運転の場合、カメラのデータを利用できる
メリット:情報が増えるので、精度の向上は期待できる
難点:カメラのRGBデータとLidarの点群データの性質は違うので、融合は難しい
◉BEVFusion:カメラとLidarデータをBEV空間で融合させる

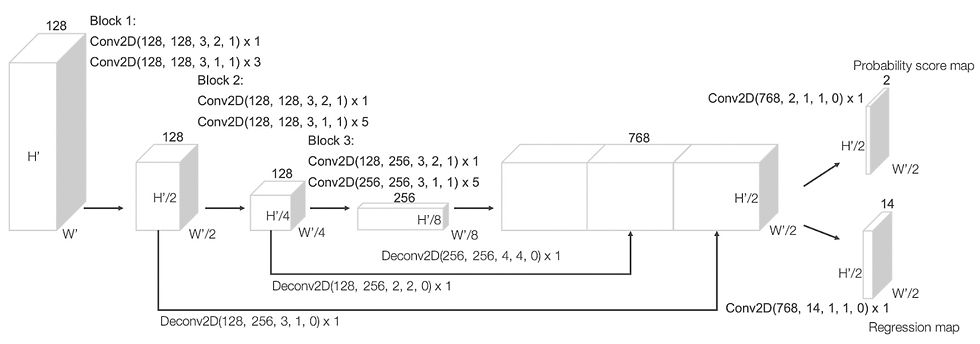
◉BEVFusionモデルの構造

◉カメラデータをBEV空間に投影する
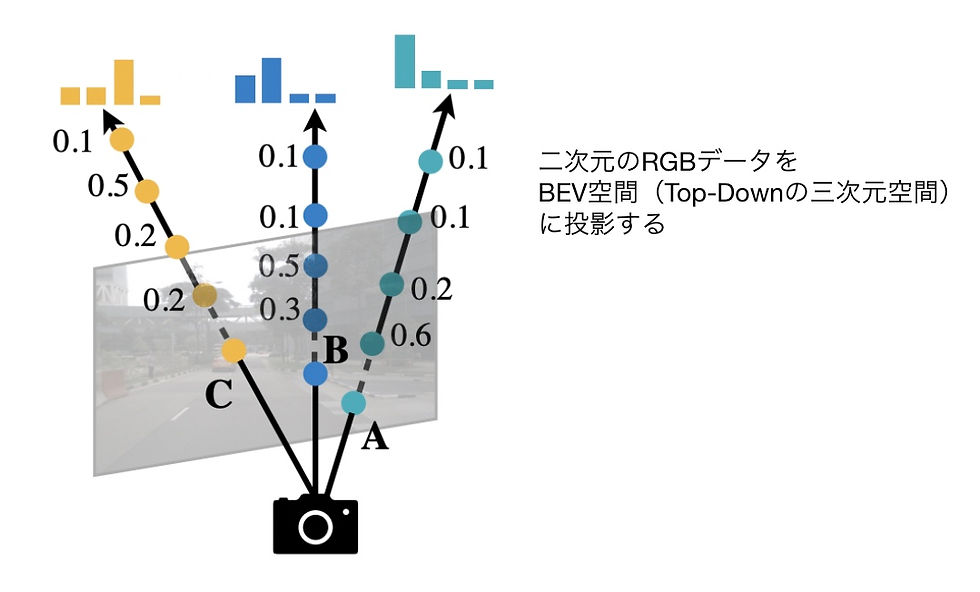

RGB画像と点群の性質が違う、融合は困難である
BEVFusionは一つの融合手法を提案した
BEVFusionはLidarのみの手法より、精度が高い
【お問い合わせ】
AIや3次元画像処理をはじめとした様々なセンシング、データ解析に関するご相談はTengun-labelまでお問い合わせください。
株式会社Tengun-label
本社:東京都新宿区西新宿4-31-3 永谷リヴュール新宿 1014号室
ブランチオフィス:東京都新宿区西新宿6-6-2 新宿国際ビルディング4F コンピュータマインド内
メールアドレス:info@tengun-label.com
TEL:080-5179-4874

コメント